This site uses cookies to improve your experience. To help us insure we adhere to various privacy regulations, please select your country/region of residence. If you do not select a country, we will assume you are from the United States. Select your Cookie Settings or view our Privacy Policy and Terms of Use.
Cookie Settings
Cookies and similar technologies are used on this website for proper function of the website, for tracking performance analytics and for marketing purposes. We and some of our third-party providers may use cookie data for various purposes. Please review the cookie settings below and choose your preference.
Used for the proper function of the website
Used for monitoring website traffic and interactions
Cookie Settings
Cookies and similar technologies are used on this website for proper function of the website, for tracking performance analytics and for marketing purposes. We and some of our third-party providers may use cookie data for various purposes. Please review the cookie settings below and choose your preference.
Strictly Necessary: Used for the proper function of the website
Performance/Analytics: Used for monitoring website traffic and interactions
LiDAR is a key enabling technology in growing autonomous markets, such as robotics, industrial, infrastructure, and automotive. To implement the solution in this post, you must have the following prerequisites: An AWS account for running the code. Calibration for LiDAR vehicle 5-DOF extrinsic calibration (z is not observable).
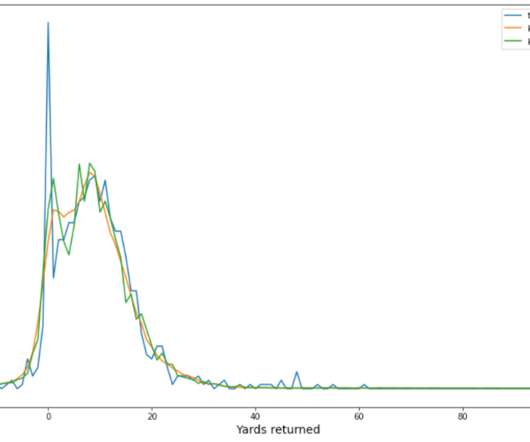
Furthermore, we looked at the probability of a touchdown and probability plots to evaluate calibration. 9.621 47.519 0.265 The following plot of the observed frequencies and predicted probabilities indicates a good calibration of our best model, with an RMSE of 0.27 k10 Baseline 0 4.074 9.62 47.585 0.306 k10 Baseline 5 4.075 9.626 47.43
We explored nearest neighbors, decision trees, neural networks, and also collaborative filtering in terms of algorithms, while trying different sampling strategies (filtering, random, stratified, and time-based sampling) and evaluated performance on Area Under the Curve (AUC) and calibration distribution along with Brier score loss.
AV/ADAS teams need to label several thousand frames from scratch, and rely on techniques like label consolidation, automatic calibration, frame selection, frame sequence interpolation, and active learning to get a single labeled dataset. Ground Truth supports these features.
We organize all of the trending information in your field so you don't have to. Join 34,000+ users and stay up to date on the latest articles your peers are reading.
You know about us, now we want to get to know you!
Let's personalize your content
Let's get even more personalized
We recognize your account from another site in our network, please click 'Send Email' below to continue with verifying your account and setting a password.












Let's personalize your content